



Autor: Sebastián García Reino
En la actualidad, los exoesqueletos han ganado mucha popularidad debido a las diversas funciones que pueden realizar. Entre ellas se destacan la asistencia en el caminar, la reducción de esfuerzos físicos y la rehabilitación. Estos avances no sólo mejoran la calidad de vida de las personas con dificultades de movilidad, sino que también encuentran aplicaciones en áreas como la industria y el deporte.
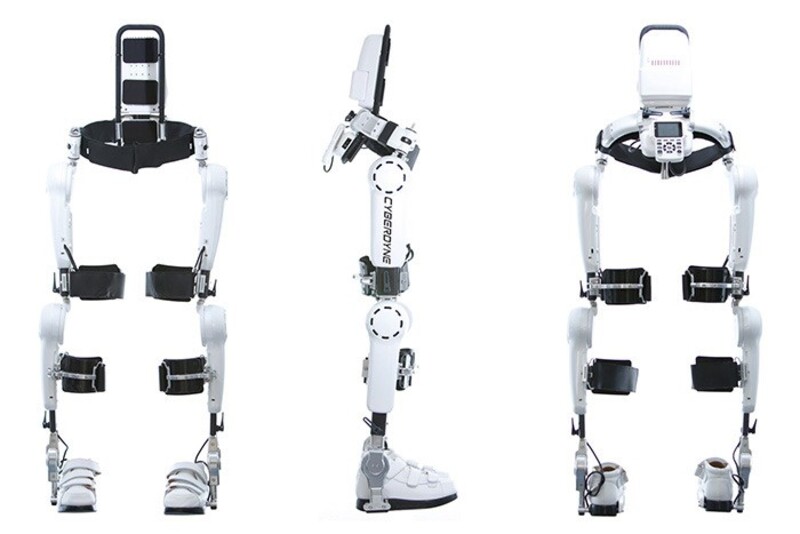
Para mejorar la asistencia al ciclo de marcha, hemos realizado un estudio detallado de varios exoesqueletos de miembros inferiores disponibles en el mercado. Nos enfocamos en aquellos con mayor impacto tecnológico, seleccionando los más innovadores y efectivos. Este análisis nos permitió caracterizarlos y recopilar la información necesaria para desarrollar el proyecto.
Nuestro objetivo es integrar las mejores características de estos exoesqueletos para ofrecer una solución avanzada y accesible. Creemos que este proyecto tiene el potencial de marcar una diferencia significativa en la vida de muchas personas, facilitando su movilidad y contribuyendo a su bienestar general.
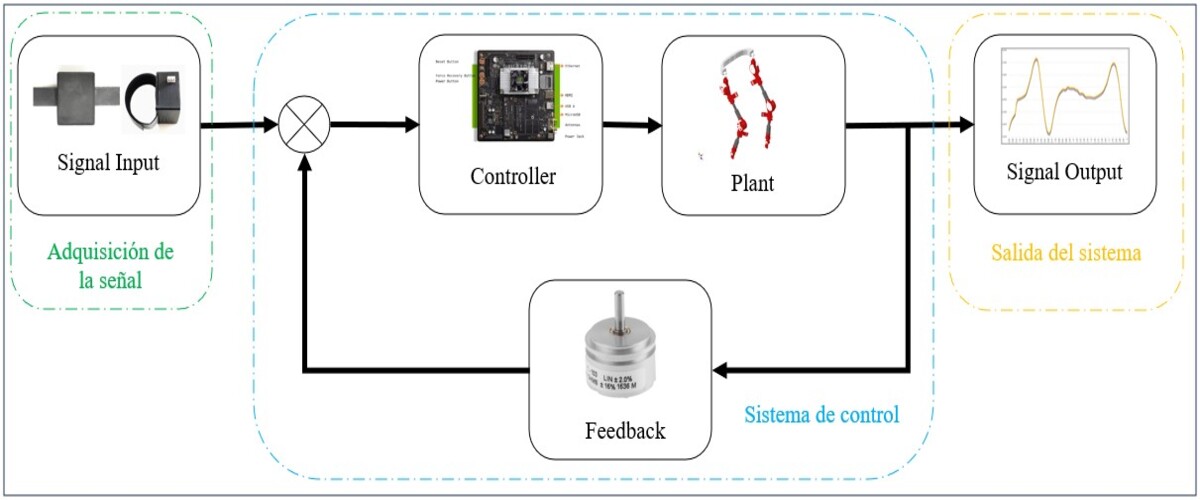
En este contexto, el aporte se centra en rediseñar y optimizar el funcionamiento del prototipo actual, asegurando que cumpla con los requisitos necesarios para un rendimiento óptimo en las áreas de mecánica y control . Es crucial que el sistema de control centralizado tenga la capacidad de interpretar la intención del usuario y generar los movimientos adecuados en cada una de las articulaciones del exoesqueleto biomecatrónico. Este enfoque garantizará una interacción fluida y eficiente entre el usuario y el dispositivo, mejorando significativamente su funcionalidad y usabilidad.

Asimismo, el control centralizado busca mejorar la estabilidad del usuario al caminar con el exoesqueleto, realizando ajustes precisos y rápidos en la posición de las articulaciones y los actuadores ante cambios imprevistos en el terreno o en la actividad del usuario. En general, un control centralizado es esencial para el correcto funcionamiento de un exoesqueleto de extremidades inferiores. Además, esperamos que esta investigación sirva como modelo para futuras investigaciones y promueva el desarrollo tecnológico en áreas relacionadas con la ingeniería mecatrónica y la biomedicina.
Sobre el autor:
Feican, C., Saquicela, C., & Calle-Siguencia, J. (2020). Kinematic validation of a lower limb exoeskeleton using computer simulation. 2020 Ieee Andescon, Andescon 2020, 9–13. https://doi.org/10.1109/ANDESCON50619.2020.9272
Los artículos publicados son de exclusiva responsabilidad de cada autor/a. El lector queda autorizado a consultar, descargar y reproducir los contenidos que se ofrecen en el folleto, siempre conservando la información del documento original, observando claramente las fuentes utilizadas y respetando ante todo los derechos de autor.